有限公司")
EN
選擇語言


成套電控系統

Product Description
起重機自動控制系統,屬于自動控制技術領域。旨在解決現有技術無法對起重機進行遠程指揮,人工指揮勞動強度大,設備故障檢修麻煩的問題。本實用新型的起重機自動控制系統包括中 央處理模塊,動作指令模塊,檢測模塊及顯示模塊,控制模塊分別與動作指令模塊,檢測模塊及顯示模塊連接。
本實用新型的有益效果是:實現起重機的遠程指揮控制,保證了生產過程的安全,提高了工作效率.采用LC+變頻器+傳感器+定位系統的系統構架,可以實現遠程操作/本地操作/遙控操作的手動/半自動/全自動的操作切換。

主要技術內容與特色
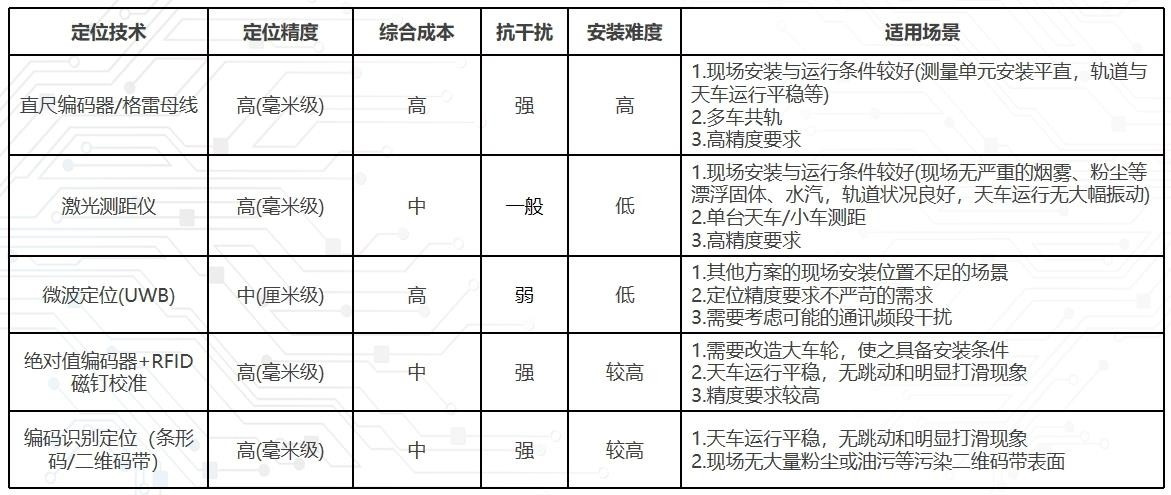
1、精確定位技術
天車的定位包括大車、小車、主鉤三個方向上的位置檢測,X軸定位測量大車行駛距離,Y軸定位測量小車行駛距離,Z軸定位用來測量行車夾鉗距地面的高度值。定位的準確性不僅直接影響吊運動作的正確性,還與安全生產密切相關。當前常用的定位技術如下表所示:
2、無線通信技術
控制系統需要對行車的運行狀態進行實時監控,因此要利用無線局域網通信技術將行車的實時位置和傳感稱重數據發送出去,并接收控制系統的動作指令。無人天車系統中的數據傳輸必須滿足可靠性、穩定性及實時性的要求,同時由于整個庫區設備數量較多,還需要具備多個節點組網通信的功能。
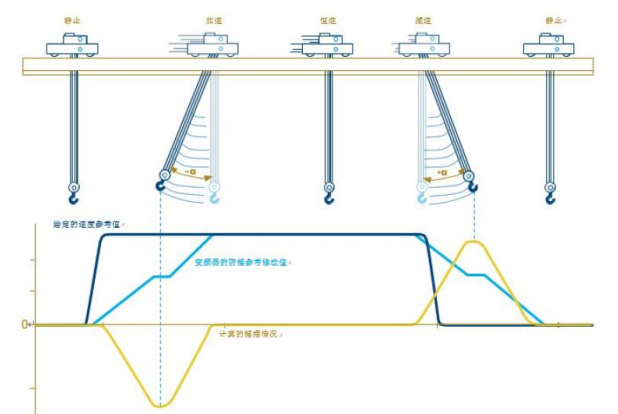
3、防搖擺控制技術
起重機實際作業時,抓斗在小車方向和大車方向均有明顯的擺動情況,嚴重影響了抓斗行車的作業效率;抓斗防搖系統可有效解決此類問題。
防搖系統可以達到以下要求:在自動工況下,無論空載和重載,小車從全速運行到完全停止的工況下,抓斗擺動一個周期內,電子防搖系統能將抓斗擺動幅度控制在±100mm以內,并趨于靜止。電子防搖系統
電子防搖程序可以預置在PLC和變頻器內置的程序進行防搖的控制。大車走行啟動后,控制程序根據傳遞函數的位置環和速度環進行耦合,保證定位系統在1mm精度的同時機車底部晃動小于30mm,同時3個擺動周期內停止擺動,停止后定位精度在20mm范圍內。
success cases
Related products

全國服務熱線
萬泰起重機(新鄉)有限公司
河南省新鄉市長垣市惱里鎮礦山大道北段東側1號











